Article Content
Introduction
The environmental crisis can be viewed as a design crisis, stemming from the way objects are manufactured, buildings are erected, and landscapes are utilized [1]. A mindset towards environmental sustainability is an urgent requirement as it is well known that the early design phase plays a crucial role here, and since up to 80% of the construction industry’s impact on the environment is determined at this stage [2]. However, today´s view on sustainability and the role of design include the three aspects environmental, social, and economic [3], which represents a holistic perspective. Spatial (flexible grid) structures, are usually considered lightweight and material-saving, and therefore viewed primarily from an environmental sustainability perspective [4], rather than a social aspect [5]. In this context, we introduce the main work areas of presented research, framed by (i) the historical and modern concept of the Master Builder, (ii) the field of bending active structures, and (iii) the mentioned three aspects of sustainability.
From historical and modern holistic concepts of the master builder to form-finding
Historically, before the division between architects and engineers, a single person referred to as Master Builder holistically oversaw all aspects of construction, from design to execution [6, 7]. This role, passed down through generations, was rooted in knowledge of materials, form, and proportions, as well as know-how in structures and building techniques. From the Renaissance onwards, with Brunelleschi`s dome of Florence Cathedral built between 1420 and 1436 as a historical turning point, the Master Builder’s role has been fragmented into more specialized professions, with architects focusing on design, engineers handling the structure and materials and construction managers taking care of on-site workflows and budget. Already in the eighteenth century, a movement initiated by naturalists sought to understand the”universal laws of form”to explain the observed structures of living organisms, and an early holistic discussion of these concepts refers to Immanuel Kant´s “Critique of Judgement” (original title “Kritik der Urteilskraft”, Appendix A) [8, 9]. Despite the benefits of professional specialization, mentioned fragmentation can lead to inefficiencies due to difficulties in collaboration, differing methodologies, and thinking approaches. This separation often results in excessive material use, poor structural form and spaces, and increased costs [10]. In response, the Master Builder model has been revisited in recent decades, with alternatives like design-build, architectural engineering education, structural arts, among others [11,12,13,14]. Particularly, integrated design concepts have proven beneficial for contemporary architectural design [15], questioning architectural design approaches that seen as a deeply subjective process foster a form or shape, which emerges from an individual´s creativity, as the form of the building has been the design factor that highlights the personal style of an architect [16]. However, finding the appropriate form, represents a central question in architecture, and designers tried to give answers, which can always be seen in the light of the respective socio-cultural environment, the pressing questions of a society. Even though functional requirements may still have a leading role in the design of architecture, but, today, so do spatial programs, site context, aesthetics, and the aspect of sensation and spatial experience. Today´s (digital) design tools support architects to explore Master-Builder-like various building forms influenced by all of these factors to explore and realize the aimed shapes. The complexities generated by computation become the solutions for design output, considered as optimized. However, there are critics in the architecture industry who claim the heavy reliance on digital tools disconnect the design output from the users, the site context, and the understanding of material qualities [16,17,18]. Goldsmith [19] argues that conceptual design, which he defines as the part concerned with getting the overall scheme laid out and devising a strategy for solving the problem at hand spatially and geometrically, can fall into two categories, either shape-finding or form-finding.
As an example, Goldsmith [19] illustrates the comparison of form-finding and shape-finding approaches by comparing two examples of Frei Otto and John Utzon. The comparison is between the physical model of Frei Otto and an early drawing of the Sydney Opera House by John Utzon. Otto used soap film models to understand the shape of an inverted tensile umbrella based on a conoidal form. For the Sydney Opera house, on the other hand, the shape of the building is generated based on curves using a ruler in a bench order. While the approach of Otto results in a minimal surface that can be directly translated into a tensile fabric structure with equal stress distribution throughout the surface, the drawing of Utzon needs further problem-solving by engineers to realize the structural form adding to the material use. In the field of lightweight structures and architecture, form-finding following physical laws often results in tension-only or compression-only structures, and consequently the assignment of appropriate material, most obvious for example at cable- and membrane structures subject to tensile stresses, or stone and concrete in arched forms subject to compression only. However, from-finding approaches to design simultaneously includes both, the chance of finding highly optimized structural solutions, and the need to solve geometrical and tectonic questions, an aspect that, nowadays is considered as the field of architectural geometry [20, 21].
Earlier, physical models played an important role in finding form and generating designs based on physical laws and the flow of forces [22]. For example, hanging models were employed besides the mathematical calculations by means of graphic statics in Antonio Gaudi’s works to find the equilibrated forms [23]. Frei Otto studied the behavior of physical models as a result of a defined problem [24] and pioneered the concept of form-finding in architecture and engineering, which is to literally find form based on phenomena in nature and physical principles [25]. His concept of form-finding is aimed at preventing any process of designing, shaping [26], or modelling [27]. For example, in the design of tensile structures, he used soap film to find the minimal surfaces [28] that equalize the distribution of tension in the whole surface [19]. Heinz Isler’s models for continuous shell structures were also the result of the experimental approach to generate form under different load types [29, 30]. Today´s digital design, simulation and fabrication tools support designers to link form-finding to realization.
Weaverbird-inspired bending active patterns and structures
Bird nest structures are examples of lightweight structures in nature. Specifically Weaverbirds, follow adaptive methodologies, and similar to ancient master builders in architecture, over time they increasingly learn from their experience in nest-building [31]. Based on what we may call intuition they integrate material properties and geometry in craft [32, 33]. While the birds` nest may seem chaotic and randomly assembled, investigations illustrate the fact that there is topological rules applied on the spatial structures they built [34]. The adjustment of the structural pattern topology assets birds to adopt their nest to environmental conditions such as resistance against wind and rain [32]. Inspired by social Weaverbirds, Nicholas et al. [35] designed a flexible spatial structure with rod elements, following both, top down and bottom up approaches in design. Leyral et al. [36] built a woven hanging model based on the study of the static scheme of the Weaverbirds’ nest. Brugnaro et al. [37] investigated the intuitive assembly process of woven structures based on Weaverbirds nesting approach and applied it on a robotic assembly of a woven structure. Mentioned research tried to encode the woven pattern of the Weaverbird’s nest topology to develop a new spatial lightweight structure. In real life, Weaverbirds mainly use strip-like grass for their nest building further explained along their nest building strategies for adaptation in Section “Weaverbird inspired design: strip material and its associated geometry”. The basic geometry of the strip material available to the Weaverbirds leads them to a “conscious” use of it, including the way it is bent and woven into a larger structure. Altogether, research on the topology of the Weaverbird’s nest is well represented in literature, but to the authors knowledge and literature review, the aspect of conscious adjustment of flexible strip material and how it results in adaptation by using strip material in different geometrical ways is less investigated.
Transferring the Weaverbirds` nest-building to architectural structures suggests the design of grid structures from flexible, usually linear material and intricately connects to form-finding. The grid of laths or strips, also called “web of wood” in timber spatial shells [38] are the main structural elements and the focus of the structure in spatial shells [39]. Prominent long-span lightweight structures such as Multihalle Mannheim [40] and Weald and Downland [38] referred to as elastic gridshells [41,42,43,44,45,46,47,48,49] emerged from such form-finding processes. Today these concepts are known as bending-active structures [41, 43, 44, 49,50,51,52,53] using initially flat linear or planar flexible elements to generate 3D forms by large elastic deformation, directly correlating geometry and structural performance.
With regard to the use of flexible strip material for spatial shell structures, we predominantly know (i) geodesic grid patterns, where the profile is parallel to the curved shell surface, and (ii) asymptotic grid patterns, where the profile is perpendicular to the curved shell surface. In asymptotic patterns the profile of the strip is aligned in its strong axis, which contributes to the stiffness of the shell [53]. Simultaneously the profile direction allows for high transparency of the grid while providing surface depth. Conversely, geodesic patterns made of strip material generally form denser and less transparent grids that appear two-dimensional due to the tangential profile direction to the surface. Examples for geodesic gridshells include the Geodesic Winding of Minimal Surfaces Pavilion [54],or the UWE Research Pavilion [55], whereas asymptotic gridshells are exemplified by Schling [56, 57], and a two layer combination of the geodesic and asymptotic is presented by the Asymptotic Geodesic Hybrid Timber Gridshell [58]. The authors´ review of numerous elastic gridshells well documents that similar grids and patterns are often used, regardless of variations in boundary conditions and scales [59]. Consequently, while applied methods and approaches in design may lead to optimized structural performance of these spatially curved structures, the layout often uses repetitive patterns [56].
Environmental, social, and economic sustainability
Environmental sustainability of form-found spatial grid structures
The aim of applying environmentally sustainable strategies in architecture, one of which is saving material, is hard to achieve by shape-finding approaches, in which a shape is created first and then the choice of material or the structural and/or the tectonic-constructive solution is sought. In contrast, lightweight structures, usually following form-finding approaches, attempt to enhance material saving by simultaneously considering form and the flow of forces in the early design stage. Form-finding flexible spatial structures is often closely connected to the concept of self-organized processes and self-organizing forms [60,61,62,63,64,65] following natural laws, as mentioned above. It means the elastically bent elements find their shape by the combination of material properties, geometry and dimensions of the profile, boundary conditions such as support conditions and applied forces. Flexible spatial structures, often realized by use of nature-friendly material such as timber represent examples environmentally sustainable, low waste and lightweight structures [66]. Such resource efficiency contributes to lowering the “negative environmental impacts”, which is a key to enhancing the sustainability level of our society [67]. Timber, compared to inorganic or fossil-sourced products and materials, has a lower environmental impact due to the reproducibility and disposal phases [68]. A review of timber’s importance in sustainable construction reveals its benefits as a sustainable material [69]. Potentials include being an ecological material [70,71,72], supporting the economy in construction [70, 72,73,74], being renewable [73, 75,76,77,78,79,80], recyclable [73, 81,82,83,84,85,86], durable [87, 88], reusable [89,90,91,92], storing carbon [78, 79, 93,94,95,96,97,98,99,100], and reducing carbon dioxide emissions [89, 93, 101,102,103,104,105,106]. Besides the use of nature-friendly materials in construction, resource efficiency in the context of flexible spatial grid structures, is enhanced by applying design methods that result in material-saving structures. Optimized use of profiles and low cut-off quantities may further reduce waste rates [72]. Since both geodesic and asymptotic strips can be developed into a planar and straight-lined geometry [107], and assuming standardized industrial sheet material or profiles cut-off rates can be marginal.
Social sustainability of spatially curved grid structures
Sustainability in building design aims not only to reduce the negative environmental impact but equally to enhancing the social aspect of well-being and life quality [67]. Studies reveal that research on sustainable (structural) design are mostly pivot around the environmental factors and neglect the social aspect [4, 5, 108,109,110,111,112]. However, the social aspect, which concerns the formation of space that advocates well-being [113], is a substantial aspect of the sustainability [5]. The majority of recent research pertains to the challenges involved in establishing socially sustainable urban areas, towns, and communities [113,114,115], specifically focusing on the development of socially sustainable cities. Certain studies investigate the social aspect of sustainability within building construction field [116,117,118,119], whereas a limited number focus on this topic in architecture [120,121,122]. In line with the European Commission’s commitment and the Davos Declaration on Baukultur to a people-centric sustainable built environment, one of the foremost objectives set for achievement by 2030 is to enhance and build upon existing advancements, aptly named “Built for and with the people” [123, 124]. All above mentioned enlighten the importance of further investigation on social aspect in architecture [3]. Meaning, sustainability is mostly investigated from the perspective of minimal material consumption or using only or predominantly environmentally friendly materials. Although such buildings often provide interesting architectural spatial characteristics and sensations – mainly because they are formally and visually very different from the traditional built environment – the social aspects of sustainability including spatial qualities, well-being, and user comfort are given little consideration. However, presently, social sustainability combines traditional elements, such as housing, health, education, and employment, with newer concepts like identity, sense of place, happiness, and quality of life [125]. The aspect that curved forms seem to be perceived as pleasant and in recent experiments, “participants were more likely to judge spaces as beautiful if they were curvilinear” and “more likely to be pleasant, sociable and creative environments” [126] well align with what is a structural necessity for spatially curved grid structures. Further important features for the well-being for users who spend their time mostly indoors are view, vistas, the visual indoor-outdoor connection and appropriate indoor light conditions including visual comfort, solar gain, the modulation of light and glare [127,128,129,130,131,132,133].
Economic sustainability of spatially curved grid structures
In many cases, environmental and social sustainability are directly connected to economic sustainability. The definitions of economic sustainability are various, but usually refers to practices that support long-term economic growth without negatively impacting social, environmental, and cultural aspects of society [134]. Simultaneously, economic growth may take place at the expense of natural resources, ecosystem services, or welfare [135]. Conversely, economic sustainability means the allocation of resources over time [136] and emphasizes a production system which offers the highest level of well-being for current and future generations [136] without compromising future needs [137]. In the context of architecture, the economic dimensions of sustainability are mostly investigated in the context of circular economy (CE) addressing environmental impacts [138], material flows and in life cycle analyses.
As above-mentioned both geodesic and asymptotic strips can be realized with developable strips [107], which supports the economical aspect of sustainability due to low cut-off rates. Strips, rods and other appropriate profiles from flexible material can create curves that allow for the generation of complex forms through elastic bending, eliminating the need for costly and energy-consuming formwork, scaffolding or pre-forming processes. Since for example strips are cut from flat sheets, material consumption is optimized, and waste is significantly reduced, resulting in significant cost savings. Additionally, the repetitive and standardized grid patterns often employed in gridshell structures are advantageous for fabrication efficiency [53], further contributing to economic sustainability by reducing both labor and material costs. Material choice may also be economically motivated and may include considerations of actual material costs, availability, self-weight, and transport, as well as costs for processing, maintenance, reuse, recycling, or disposal. Focusing on cost-driven material efficiency ensures the economical use of resources, aligning with sustainable building practices.
Observations on the state of the art
Elastic gridshells and the repetitive patterns used in their construction—whether asymptotic, geodesic—have been designed and built with high precision and quality for many years. While these lightweight structures are considered environmentally sustainable, capable of spanning large distances with minimal material usage, and often regarded as exceptional achievements of engineering, they seem to fall short of addressing critical architectural considerations. Typically conceived and executed primarily from a structural perspective, these structures often overlook important factors such as integration with the urban context, alignment with cardinal directions, and the architectural need for variations in density, texture, and pattern, highlighting a clear gap in current research and practice.
Specifically, the varying combination of asymptotic and geodesic patterns on a same surface or envelope is not known in literature and proposed here (Fig. 1). Undoubtedly, continuously combining asymptotic and geodesic patterns requires transitioning the orientation between the respective strip profiles, which in return may increase the design space and therefore seem reasonable for both architectural and structural designers. By changing the profile orientation or alternating between asymptotic and geodesic patterns and vice versa, the stiffness of areas of the gridshell can be varied in a targeted manner and at the same time has an effect on the bending radii of the elements or the curvature of the overall form. Structural and architectural design that strives for Gestalt [139], may consider pattern combination and pattern transition and their targeted use for space creation. A smooth transitioning between the geodesic and asymptotic pattern types may generate curvilinear shapes resulting in increased spatial space recognition and appreciation as studies show [126]. The deliberate use of aspects such as the varying patterns and grids, the gradual change in their density, transparency and surface depth are decisive architectural criteria for the creation of space, which go in tandem with the expected structural performance. Important architectural features satisfying the visual comfort and well-being of users who spend their time mostly indoors include views, vistas, the visual interplay between indoor and outdoor environments, appropriate level and incidence of natural light including solar gain, lighting control and glare [127,128,129,130,131,132,133], all of which can be influenced or controlled by profile orientation and profile dimensions. In this sense, continuously combined asymptotic and geodesic spatial patterns of flexible grid structures may not only address the environmental but also the social aspect of sustainability.

Spatial impression of the A-T-G Louvers showcasing a sophisticated architectural element composed of slender plywood strips, which demonstrate a combination of continuous asymptotic and geodesic patterns
Following main questions guide our exploration of new approaches to material use, geometric configurations, and overall design processes related to the intersection of social and environmental considerations in architectural design:
- Assumingly using the known advantages of repetitive structures including simple detailing and assembly, how does the bending-active and twisted use of flexible and continuously straight-lined strip materials, inspired by natural structures like Weaverbird nests, enable the creation of innovative, adaptive, and sustainable architectural forms?
- How can a targeted distribution of geodesic and asymptotic grid patterns and consequently their combination and pattern transition be merged into one continuous but varying, flexible spatial structure to improve both architectural aesthetics and performance?
- And more specifically, how can the integration of form-finding principles with flexible, curvilinear grid structures contribute to both material efficiency and the creation of socially sustainable spaces that enhance user comfort, well-being, and spatial experience?
Structure of the paper
Section “Introduction”, Introduction, addresses the environmental crisis as a design issue, equally emphasizing both aspects of sustainability: the social and the environmental. The introduction has three subsections: Section “From historical and modern holistic concepts of the master builder to form-finding” frames the concept of the Master Builder, Section “Weaverbird-inspired bending active patterns and structures” clarifies the scope of the paper, focusing on bending-active structures, and Section “Environmental, social, and economic sustainability” addresses the three aspects of sustainability in this type of structures. In Section “Aim, methods and limitations”, we introduce the aims in Section “Aim”, all applied methods -from generation to simulation to evaluation, and observation- in Section “Methods” and limitations of presented research in Section “Limitations”. Section “Weaverbird inspired design: strip material and its associated geometry” acquaints with Weaverbirds as the inspiration of our research, discussing their nest building strategies and material choice. Following a detailed explanation on plywood strip material in Section “Plywood strip material”, Section “Geodesic and asymptotic curves on curved surfaces” explains the generation of geometrical patterns of asymptotic and geodesic lines, strips and patterns, along with their meaning for detailing and assembly. Characteristic and geometrical information about twist as a mediator between the different grid patterns is explained in Section “Twist as the mediator between geodesic and asymptotic strips”. Section “Design and realization of the Asymptotic-Twist-Geodesic (A-T-G) Louvers” is dedicated to the A-T-G prototype, with Section “Shaders and glare” providing a definition and explanation of shaders, discussing the importance and effect of view, vistas, and glare as architectural and user comfort aspects in Section “View, vistas and glare”, and a comprehensive description of the design concepts and design process of the prototype in Section “Design concept of the Asymptotic-Twist-Geodesic A-T-G Louvers”. Section “The realization of the Asymptotic-Twist-Geodesic (A-T-G) Louvers” provides insights into the assembly procedure. Section “A-T-G Louvers evaluation”, presents the evaluation of the prototype by two methods of human observation explained in Section “Visual observation” and monitoring explained in Section “Monitoring (simulation and sensors)”. The monitoring evaluation consists of sub-sections including comparing the simulation with reality in Section “A comparison of simulation and reality”, comparing the light intensity of the sensors data for both non-shaded and the A-T-G Louvers shaded windows in Section “A comparison of non-shaded and A-T-G Louvers shaded according to sensor data”, and the advanced evaluation by machine learning in Section “Enhanced evaluation with machine learning”. Finally, in Section “Discussion, conclusion, and future work”, we discuss and reflect on our research, summarize our findings, and conclude, while opening the door for future questions and research.
Aim, methods and limitations
Aim
Addressing two of the three aspects of sustainability, namely social and environmental sustainability, this paper presents a methodological and consequently geometric framework to introduce a Weaverbird-inspired, integrated design concept culminating in the realized Asymptotic-Twist-Geodesic (A-T-G) Louvers as an alternative to conventional blinds for office and computer workspaces. Our investigations aim to use a 90° twist of thin flexible plywood strip material as a mediator between asymptotic and geodesic grid patterns and their architectural features on a same surface to create a bespoke gridshell-like structure that balances the level and incidence of natural light and glare for indoor workspaces. Assembled from continuous, straight-lined strips, the A-T-G Louvers serve as a vehicle for comparison and evaluation of the architectural intervention´s performance, and finally as a proof of methodologies and concept.
Methods
Our research employs a variety of methods, spanning digital and physical approaches for generation, simulation, evaluation, and observation. We organize our methods according to their specific purposes—simulation in Sections “Material studies and informing the digital simulation of bent and twisted configurations” and “Environmental studies and glare simulation”, generation in Section “Pattern generation by interpolation of discrete segments and surface smoothness”, and evaluation/observation in Section “Observation and evaluation/comparison of data from simulation and full‑scale prototype”. The methodologies employed in our research cover a spectrum of investigations, including geometrical studies of patterns, material studies focusing on the testing of flexible materials—primarily thin strips of plywood. Additionally, our research involves digital simulation and physical prototyping of elastically twisted strip materials, environmental studies with a focus on Annual Glare analysis and its corresponding simulations, the amalgamation of various studies and information, and the execution of a realized case study centered around the prototype of the Asymptotic-Twist-Geodesic (A-T-G) Louvers. The A-T-G Louvers case study underwent thorough observation and evaluation, including a comparison of data obtained from both simulation and the full-scale prototype.
Material studies and informing the digital simulation of bent and twisted configurations
To gain insights into the bending and twisting behavior of the plywood material, the authors build a testing device as shown and explained in Section “Twist as the mediator between geodesic and asymptotic strips”. The material testing aims to find the overall bending and twisting strip geometry in various configurations, and the minimum bending radius and the required transition distance for a 90° twist of the sheet material. The results from the series of experiments are used to inform the digital simulation with material data, and also serve as references for digitally generated geometries.
We measure the coordinates of a set of points along the tested strip edges. As explained in Section “Twist as the mediator between geodesic and asymptotic strips” different support configurations of the strips are applied and compared. The minimum bending radius for the strip in general and also for each individual configuration is of specific interest, as it also defines the limits to cracking of the material. However, performing physical tests of the bent and twisted strips, digitalizing, identifying and calculating curvature radii is a time-consuming but essential process to evaluate and tune the digital simulation. The elastica curve theory, implemented with the Kangaroo physics engine [140], is used to simulate strip deformation. The digital bending and twisting are limited to a range between straight and the identified minimum curvature radius of the material depending on the support configuration. Additionally, we applied a safety margin of approximately 24% for minimum bending radii and approximately 7% for the transition distance.
Environmental studies and glare simulation
Both regular and imageless annual glare analysis methods [141] are used in this paper. Ladybug/Honeybee [142], a grasshopper plug-in for Rhinoceros3 d [143] is used for annual Glare simulation. The regular method is used for comparing simulation and reality, which is explained in detail in Section “Observation and evaluation/comparison of data from simulation and full-scale prototype”. The imageless annual glare analysis method is used as a key design parameter for below explained surface and pattern generation. While regular Daylight Glare Probability (DGP) [144] calculates glare based on high-quality renderings, which can be computationally expensive and time-consuming, imageless DGP replaces rendered images with view factor-based calculations to the discretized sky dome for direct lighting. This method significantly speeds up the process while maintaining accuracy [145]. It uses daylight coefficient and general sky matrices in climate-based daylighting simulation, avoiding the need for rendered images.
Glare Autonomy (GA) can be described as the proportion of occupied hours for a certain viewpoint during which glare is absent [141]. This is determined by analyzing a series of DGP values in a set of hours that the specific space is in use. The result is a matrix of values (Eq. 1) each index of the matrix is like a sensor in space and has a value between 0 and 100.
In Section “Discrete segments analysis based on the design criteria”, the GA results are calculated based on imageless DGP analysis over a year. The matrix rows and columns define the sensor’s i,j GA percentage. The basic requirements for the GA analysis are a defined geometrical building zone, the material characteristics, the radar grid, and the weather data in EPW (.epw) file format of the target location. The building zone needs a geometrical representation of the building, in our case consisting of the window, wall, shader, ceiling, floor, and neighboring context. The material characteristic defines the type of material used for each of the target building geometry with corresponding thermal features. The ladybug, honeybee plugin for the grasshopper [146], using EnergyPlus [147] and theorem engine, has access to the ASHRAE material database [148] and the Rhinoceros3D geometrical library. Therefore, it is possible to digitally and parametrically set up the virtual built environment, add geometrical objects, and assign materials characteristic to them. Having the parametric control makes it possible to set up the environment, store the data, modify the parameters, run the analysis, and compare the different results.
Pattern generation by interpolation of discrete segments and surface smoothness
The aim of generating a geometrically and loadbearing bespoke spatial pattern may be the result of a shape-finding process and/or a form-finding process that follows physical laws. However, as soon as requirements such as functional and other architectural aspects and features need to be included in an overall—one may say holistic – design process, finding an efficient load bearing structure and pattern is an important but not the only objective. In this sense we look at functionally and aesthetically driven pattern generation more from the perspective of shape-finding but not shaping (see introduction Section “From historical and modern holistic concepts of the master builder to form-finding”), and still keeping in mind the structural meaning of the found shape. Accordingly, we propose our developed methodology that uses discrete segments of a surface that are combined, interpolated and finally smoothened to a continuous geometry.
The surface generation starts with a set of discrete segments, means the later continuous surface S is composed of N x M number of discrete segments SE. The objective O drives the equation to find the SE configurations based on target Y. In this paper the objective is to minimize the Mean Squared Error (MSE) of Y and , which depends on Di, Ti, and Pi for all SE segments. D defines the distance of the segment from original coordinate, T is the transparency of the segment, defined as the amount of material used in a surface area and calculated as the area of the strips in m2 divided by the rectangular segment surface area in m2, and P represents the profile direction of the strips. The optimization problem can be formulated as:
In order to generate a smooth surface from U, V network curves we interpolate the discrete segments (SE). The Interpolation function I applies on the optimized set of segments SE to find the network of curves in U and V direction. U curves are related to SEh (h = height) representing the vertical edges of the segments SE and V curves are related to SEw (w = width) defining the horizontal edges of the segments SE. Pu and Pv are the surface points of U and V curves, respectively.
Finally, the combined and interpolated surface S is transformed into a smoothened continuous surface as follows. The equation of a Non-Uniform Rational B-Splines (NURBS) curve is as follows [149]:
Where q is the number of control points P each associated with a corresponding weight wi. N is the linear interpolation function [150]. The equation shows the importance of wi on pi in control of the curvature of the resulting curve, as changes of the weight wi of a certain point pi causes a change of the resulting overall curvature. As a result, the Gaussian curvature of the generated surface from the U, V is affected. Considering this, we evaluate q number of points on U, V curves, creating a set of Pu/Pv points. Equation (8) is used to mathematically regularize [151]—minimize some weight coefficients or drive some coefficients to zero—to update the curves and the resulting surface. It is possible to calculate the Gaussian curvature of the surface at each Pu/Pv point [152] with Eq. (9) where k1 and k2 are minimum and maximum values of principal curvature at a point P on the surface. The principal curvatures at P can also be denoted as the reciprocal value of the associated curvature radii r1 and r2.
Having the Gaussian curvature values from the evaluated points, we can define an objective to regulate the NURBS weights of the U, V curves to obtain K < 0 at every q point. This results in updated U, V curves ,.
The objective can be presented as follows:
The continuous surface S (,) constitutes from the equation with updated weights:
The Gaussian curvature analysis is used to assign applicable types of patterns onto the surface. By evaluating the grid of points on a surface, the Gaussian surface curvature at each point of the grid is calculated. The Gaussian curvature analysis results define the overall surface curvature categorized as synclastic for values K > 0, monoclastic or planar for values K = 0, and anti-clastic for values K < 0 and consequently predefines the applicability of a geodesic or asymptotic pattern. The curve trace on the surface and numerical interpolation are employed to mix the two patterns of geodesic and asymptotic. This geometrical method applies following the steps below:
- 1.Starting from a point on a surface.
- 2.Tracing the asymptotic direction [153] on the surface at a certain length and stop.
- 3.Defining a target point on a surface.
- 4.Finding the points in between the asymptotic stopped point and target point with a geodesic curve [154, 155].
- 5.Merging the asymptotic and geodesic direction points.
- 6.Finding the set of points from asymptotic stopped point based on material twist length.
- 7.Remove the set point in the region.
- 8.Interpolate the remained points curve with respect to the surface.
Object-oriented programming with Python programming language [156] is used to evaluate multiple curves on the surface form independent start points in parallel. Surface curvature analysis provides information about applicable patterns on the surface. Multiple start/end points define the structural pattern support points. Parallel computing generates all curves of the pattern and their intersection on the surface. Individual curve profile meshes are generated geometrically.
For the case study of the Asymptotic-Twist-Geodesic (A-T-G) Louvers the above-described methods, including material studies and simulation, environmental studies and glare simulation as well as the pattern generation by interpolation of discrete segments and surface smoothness were applied and combined. The discrete geometrical analysis is employed to generate the surface. Systematically, the design surface is divided into N*M individual flat discrete segments. The daylight simulation objective defines each segment’s distance from the origin, transparency ratio, and profile direction. All discrete surfaces are then combined into a segmented surface. The interpolation method of the discrete segment edges defines the overall surface principal curvatures. The network of the principal curvatures generates the continuous non-uniform rational b-spline (NURBS) surface. The algorithms for segment configuration and segment generation are presented in Appendix B and C, respectively.
Observation and evaluation/comparison of data from simulation and full-scale prototype
The realized prototype of the Asymptotic-Twist-Geodesic (A-T-G) Louvers, is evaluated both, by human observation and by sensor-monitoring.
Human observation includes the view, vista, and glare effect visually by the authors and other users of the office and computer workspace. We compare the view and vistas that we intentionally considered in the digital design process with those of the realized structure. Additionally, we monitor the use of space in the same room and the frequency with which users chose their working space and desk near the designed prototype for both, before and after the A-T-G Louvers installation. The human observation of the glare experience was specifically considered. The occupancy of the office and computer workspace by users working on computers, respectively using monitors, and their preference for seating before and after the installation of the blinds is observed for both individual and work in groups.
By monitoring we mean the numerical measurements of glare effect by simulation and photoresistor sensors. We monitor the workspaces where the realized structure is located and compare the light intensity between the non-shaded and the A-T-G Louvers-shaded windows. The data is captured by photoresistor sensors model PGM5516 and received by an Arduino Uno board. The sensor output is a resistor value between 0 and 1. Several approaches for converting the sensor value to light intensity (lux or cd/m2), depending on the corresponding photoresistor, can be used. Regarding the provided information of the datasheet, we use the following method: To convert the resistance value to the light intensity [157,158,159], firstly voltage divider equation applies where Vmeasured is the voltage across the photoresistor, Vsupply is the supply Voltage of 5 V, Rphoto is the resistance of the photoresistor which is 7500 based on the datasheet, and Rfixed is the resistance of the fixed resistor that is 10 KΩ based on the resistor datasheet.
From this equation, we can rearrange to find Rphoto:
Considering a linear relationship between the photoresistor and light intensity from the data sheet and knowing the resistance of the photoresistor at a certain light intensity (e.g., 10 Lux), we estimate the light intensity by:
This equation provides an estimation of the light intensity based on the measured voltage across the photoresistor and the known characteristics of the photoresistor from its datasheet.
Machine learning to facilitate observation
To predict the output value of the PGM5516 sensor, we need a regression model because it returns a continuous variable within a range. Since all sensors are form the same manufacturer and type, they have identical ranges. In machine learning, a regression model predicts a continuous variable from a set of features, where each feature is a measurable property or characteristic of a phenomenon. Selecting informative features is crucial for prediction accuracy. We use the pairwise dependence of features to select the most useful ones. We provide a detailed explanation of this feature selection process in Section “Enhanced evaluation with machine learning”.
The X values (training data) consist of seven features: time, solar energy, solar radiance, humidity, temperature, sun altitude, and azimuth angles. The Y (prediction value) is the sensor’s output value, which will be converted to light intensity with Eq. 14 after prediction. The model input X is a two-dimensional array consisting of number of the training data and number of the features. The amount of the training data obviously depends on the recording sequence and time.
The model outputs a single value, y, for each sensor. With multiple sensors, the output for an input feature takes the form of a one-dimensional array Y containing continuous variables. The size of this array corresponds to the number of sensors. The multi-output regression Random forest model [160] is used to train a model that predicts the indoor light intensity based on the monitoring data. The R2 score method [161] is used for the regression model accuracy measurement. The R2 equation is as follows.
Where Yi is the actual sensors output values, the is the regression model prediction, is the mean of the actual sensors output values, and m is the number of the data.
Limitations
Our proposal deals with planar and doubly-curved surfaces, exemplified by a spatially-curved surface. Presently, we are working with linear, straight-lined flexible strip material. According to the scale of the realized prototype the material is limited to 3 mm plywood due to its appropriate flexibility for the required twist and bending radius, as detailed in Section “Twist as the mediator between geodesic and asymptotic strips”. This material choice is also economically motivated. In the proposed study and prototype, the applicable structural patterns on the surface are limited to two groups: geodesic and asymptotic grid pattern types. Amongst many possible transitions between these pattern types, a smooth transition between geodesic and asymptotic grid pattern is intended, facilitated by a 90° twist of the strip profile direction. that is enabled by a twist in the profile direction. As the A-T-G Louvers is an early-stage prototype, serving as a proof of concept, cost in terms of material used, labor involved or as a customized product is not a primary importance, and is therefore, not the focus of our approach and design.
Weaverbird inspired design: strip material and its associated geometry
Weaverbirds are unique nest builders developing an almost spherical form with material available in their surrounding nature. They have an overall vision of the final surface geometry of their nest [162] which they build with different, usually flat grass material [163]. Weaverbirds mostly select long strip-like cross sections such as Cyperus textilis, phragmites australis, and Carex clavatas [164] as their favorite building material. Surface texture of nests [32], found on the majority of surfaces, holds details about how surface elements are arranged structurally [165], and illustrate that Weaverbirds are able to learn to create nests adapted to specific environmental conditions, such as in response to varying climates or specific locations on the tree. So, they perform conscious nest morphology modifications, arrange their nest in specific order [166], and based on cognitive selection [167]. The nest-building process of Weaverbirds follows a hierarchical approach; if a material fails to adhere during the initial attempt, they frequently move to another location and make another attempt [162]. The trial-and-error method employed by Weaverbirds aids them in acquiring the knowledge to make local adjustments to the nest morphology during construction. Investigations have further shown that the nests built by male Weaverbirds have low to almost no morphological repetition as they adapt their behavior based on their environment and experiences [168, 169].
Plywood strip material
Flexible spatial structures made of wooden strips have the potential to respond to design criteria, for example, glare control in our A-T-G Louvers project, by implementing Weaverbirds´ strategies in surface texture [170]. To achieve curved configurations or shapes in architectural structures and objects, usually three fabrication relevant categories are considered; (i) subtractive (cut or mil) and additive techniques, (ii) approximate the shape by use of straight discrete parts, and (ii) bend to shape.
We focus on the third category for forming curved surfaces and structures by bending strip material. This forming method can be considered ecologically and economically sustainable due to the lower need of cost and energy. Also, advantages such as ease of transportation and assembly make this method relevant for sustainable design solutions. Depending on the size of the members and the desired object, these materials can be assembled to woven [171,172,173,174] or grid structures [38, 175, 176].
Grid-type structures, may allow for simple and repetitive detailing and connections of wooden, metal, and plastic elements. Wooden species include Pine as used in Essen Pavilion [177], German Pavilion [38], Multihalle Mannheim [177], Oak in Earth Center [178] and Weald and Downland [179], Larch such as Savil Garden [180], Green Chesnut showcased in Chiddingstone Orangery [181], spruce wood as in Toledo Gridshell [42, 176, 182], birch plywood such as Geodesic Winding [54], Jukbuin Pavilion [38], and Zero-gravity structure [183], bamboo as in Computational Bamboo [184] and Camboo Pavilion [185], veneer as used in Triaxially woven structures [172], Paper tubes as used in Japan Pavilion [186], natural fiber biocomposite built from natural flax and hemp as in LightPRO Shell Pavilion [187]. Metal products consist of stainless steel as used in Inside/Out gridshell [188], aluminum such as Seibu Gridshell [189]. Glass fiber reinforced polymer (GFRP) such as Flying Dome [190] and Creteil Church [191], and combined bamboo and carbon fibers as used in Bamboo Ring [192] are among plastic-based elastic gridshells. Due to our review on 44 elastic gridshells, timber and wooden composites are the dominant materials. Together with the material flexibility, the geometry of the profile is the most important characteristics for achieving the desired bending radii. Circular profiles, distinct from rectangular or square cross-sections, exhibit a singular point of contact, offering potential advantages in node-detailing [193]. Conversely, materials with rectangular or strip configurations provide the possibility to use a stiff and a weak axis of the profile, and the opportunity to orient them not only based on structural requirements but also in alignment with architectural preferences. This enables control over surface depth, light modulation, and the density of views and vistas.
Thin, elastic plywood is the material of choice for our testing purposes and later prototyping for several reasons including sustainability, aesthetic, economic, product availability and ease of processing considerations. The straight-lined strips are cut from a flat sheet of 3 mm plywood with a thickness tolerance of + 0.2 mm to − 0.4 mm and a volumetric mass density of 380–440 kg/m3 as provided by the manufacturer´s data sheet and based on their internal laboratory tests [194]. The width of the strips is considered 50 mm which fits the overall size of the structure and the intended transparency and density in the later realized A-T-G Louvers prototype. According to the product data sheet, this specific type of plywood has a high level of flexibility, and consists of three layers of Austrian Poplar veneer from sustainable forest management. To guarantee smooth bending and twisting of strips and to minimize potential cracking, the direction of the two top layers is oriented perpendicular to the longitudinal axes of the strips [183]. The strips vary in the width-to-length ratio but in a range of 1/28 to 1/60 depending on their later geodesic, asymptotic or twisted path on the surface. These ratios and the minimum bending radii of the plywood strip material are based on the physical experiments explained in Section “Twist as the mediator between geodesic and asymptotic strips”.
Geodesic and asymptotic curves on curved surfaces
As above-mentioned, we apply analogies of Weaverbird’s nest-building to geometrical approaches to the design of spatial structures. Following Weaverbird-inspired strategies to control adaptability, the geometrical principles related to the structure´s morphology are essential. When attaching a flexible, straight-lined strip, like a tape, onto a curved surface, several geometric considerations are essential to ensure a proper fit and adherence. Here are the key factors to be considered:
The curvature of the target surface needs to be analyzed whether it maintains a constant curvature, varies across the surface, or exhibits irregularities. Understanding the smoothness of the curvature is fundamental as it serves for determining the precise manner in which the strip must bend and conform to the surface.
Another critical aspect involves determining the orientation of the strip with respect to the surface, as the strip is supposed to tangentially align with the surface, or at a specific angle. This consideration is pivotal ensuring a seamless attachment. In presented research, we consider the flexible but straight-lined strip either tangentially (geodesic) or perpendicular (asymptotic) to the surface.
To analyze a curve on a surface, a coordinate system consisting of three axes is considered. The T-axis is the curve direction, the N-axis is the surface normal vector, and the P-axis is perpendicular to the other two axes [56, 107, 195]. The characteristics of each curve on a surface are defined with three values of normal curvature kn, geodesic curvature kg, and the angle between the curvature of the curve and the surface normal α. If “α = π/2 along the curve, the kn = 0, and the curvature vectors lie on the tangent planes” the curve is categorized as an asymptotic curve. A geodesic curve is defined where “α = 0, kg = 0, and the curvature vectors are in the planes spanned by the tangents and surface normal” [56].
Through the assessment of various points within the domain of each curve on a surface, it is possible to quantify the geodesic torsion (Tg), normal curvature (kn), and geodesic curvature (kg) along the curve [188, 196]. The values of Tg, Kn, and Kg reveal that any alteration in the surface directly influences the curves of the surface, thereby impacting the pattern morphology, and vice versa. Figure 2 shows two exemplary geodesic and asymptotic curves on a doubly curved surface and the corresponding Tg and Kn.
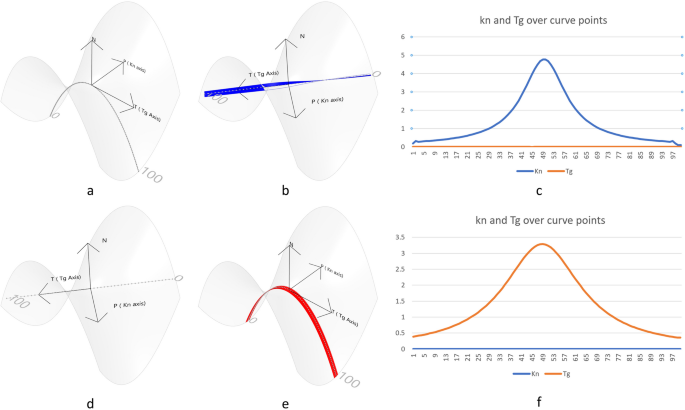
A geodesic (a–c) and an asymptotic (d–f) curve. From a to c and from d to f, a series of points (0 to 100), the curves’ profiles due to the individual curve characteristics, and the comparison of Tg (twist of the profile) and Kn (geodesic torsion) along the curve
The left column of Fig. 2 shows 101 points on a surface following the geodesic curve. The local coordinate consisting of N, T, and P axes is shown at the 50 th point in the middle of the surface. The rotation of N-axis around the T-axis over the curve path defines the Tg (geodesic torsion). Change in the Tg means a twist of the profile. The rotation of N-axis around the P-axis over the curve path defines the Kn (geodesic torsion) resulting in the bending of the profile. The same coordinate is represented in the right column for an asymptotic curve. Figure 2c and f show the change of Kn and Tg along the curve on the 101 points. The X-axis of the chart represents the point index on the curve, and the Y-axis shows the curvature change in degrees. As Fig. 2c shows, for the geodesic curve, the Tg remains 0 along the curve, meaning that the profile has no twist. However, Kn changes along the curve, resulting in the bending of the strip profile in its weak axis. Figure 2f shows that, for the asymptotic curve, the Tg changes along the curve, resulting in a twist of the strip profile. On the other hand, the Kn remains constant, meaning that the profile has no bending.
Twist as the mediator between geodesic and asymptotic strips
Twist involves the act of rotating or distorting one object around another [197]. Torque is additionally described as a force leading to rotational motion or turning [198, 199]. When referring to”twist,”we describe the process of material twisting around a longitudinal axis, resulting in a torqued shape. In architecture, twist, torsion, and torque are usually used interchangeably. Material and structural-wise, torsion is usually not considered a positive aspect [200]. However, some researchers have shown the potential of using twists in cantilevered beam structures [183], hybrid structures consisting of elastic strips and fabric [201], and curved wooden elements [202,203,204]. To overcome the difficulties in the design and fabrication of complex shapes using elastic materials, an elastic twist may be beneficial [205].
Twist in architecture creates a dynamic feeling due to the flow of form and can be considered as an interesting aspect of aesthetics. Even though there is clear difference exists between the helicoidal shapes [206], such as a staircase evoking the twist, and the twisted elements, where the material has undergone a twisting action [202], examples of twisted columns [207], towers such as Turning Torso [208], and staircases as known from Gaudi’s work [209] show designers’ interest in the twist. Albeit the aesthetic aspect of twisted shapes is important for architectural designs and also present in the A-T-G Louvers project, in this section, we focus on the potential of twist and how we methodologically use it in our design. We also provide details about the physical tests on the material to learn the material limits for the realization process, and to inform our digital simulation.
Using flexible but straight-lined strips allows for bending around the weak axis of the profile only. As shown/described above, this way, a strip can follow a geodesic or asymptotic curve on the surface. Strip material can also be twisted around its longitudinal axis or simultaneously be twisted and bent. So, twist can serve as a mediator between a geodesic or asymptotic strip on a surface, seamlessly and smoothly combining them into one consecutive strip. Similar to bending, the twisting potential of an element depends on the material’s behavior and flexibility range. To find the material limits in bending and twisting, we apply a series of physical tests. The experiments’ setup is shown in Fig. 3. The tested strips have a width-to-length ratio of 1/40 and a width of 50 mm, as later used in the A-T-G Louvers prototype.
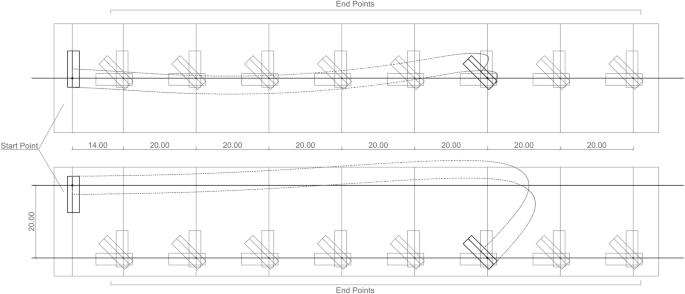
Physical experiments’ setup from top view. Top: first setup where start and endpoint of strips are in one plane. Bottom: second setup where the start and endpoint planes have a 200 mm distance. The dashed curves represent the strips and the black lines show the axis of the start and endpoints
We investigate the possible shape of a single strip for spans between 140 and 1540 mm in a sequence of steps of 200 mm. The start point of the strip remains at the same point, and the endpoint is twists by rotational angles of 0°, 45°, and 90° in each step. Both endpoints are hinged at the supports, an important aspect, as we aim to find the self-organized forms of the strip. The experiment is started with the both ends in one plane and then with a translational distance of 200 mm, therefore considering the curvature of the surface and displacement in the XY plane. As an example, Fig. 3 includes one generated strip, represented with dashed lines, at a span of 1140 mm and a rotational angle of 45° at one end.
Figure 4 shows an overlay of all 24 investigated configurations of spans, rotational angles, and translations, which reveal the minimum bending radii of the strip material. The results show that the minimum bending radii range from 180 to 200 mm, which is due to the material tolerances of the plywood mentioned in Section “Plywood strip material”. Examples where the minimum bending radius is 200 mm are shown in Fig. 5. In both settings, the span is 140 mm. Figure 5 shows a plywood strip with both supports in one plane and a rotational angle of 90° (Fig. 5-top), and a plywood strip with the supports translated by 200 mm a rotational angle of 45° (Fig. 5-bottom). To leave a safety margin for the later prototype, we consider the minimum bending radius as 230 mm. The minimum required length of the material for a 90° twist, needed to rotate the profile from asymptotic to geodesic, is also tested. The transition distance for our 3 mm plywood ranges from 650 to 680 mm. Due to the plywood´s thickness tolerance and to ensure a safety margin for the later prototype, we consider the 700 mm as the required distance for a twist. These values were implemented in the digital simulation as material properties and the associated ranges in bending and twisting.
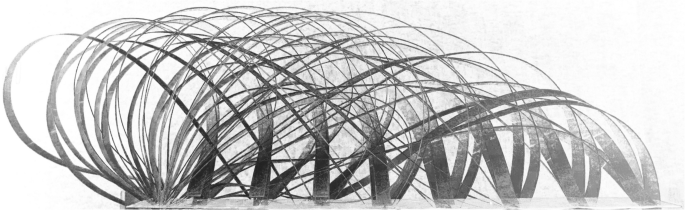
The physical test on the material for different spans and twist angles of 0°, 45°, and 90°. We extract the twist ratio and the minimum bending and twisting radii of the material and inform the digital simulation for the elastic members’ generation
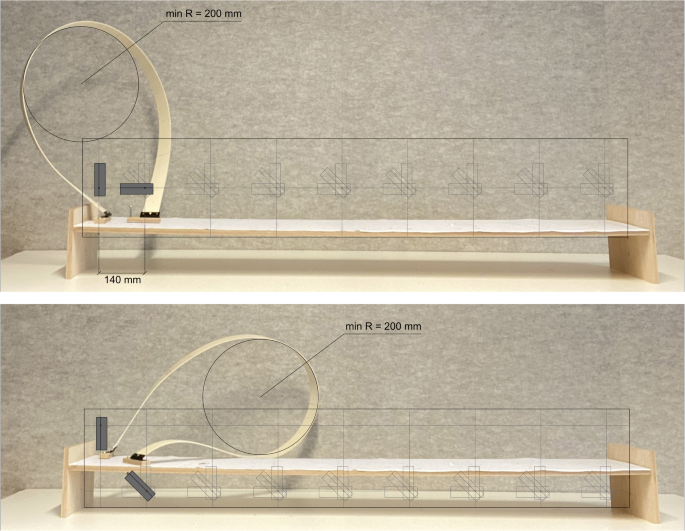
Two examples of minimum bending radius in the span of 140 mm. Top: The situation in one plane, the endpoint twists 90°. Bottom: The situation in two planes, the endpoint twists 45°
Design and realization of the Asymptotic-Twist-Geodesic (A-T-G) Louvers
As discussed in the previous sections, twist serves as the mediator between the two pattern types; asymptotic and geodesic. Consequently, our prototype is coined the Asymptotic-Twist-Geodesic (A-T-G) Louvers, which refers to the two pattern regions with the twist in between to allow for a seamless and a smooth transition. This smooth transition allows for rotating the profile direction and therefore transition between areas with varying surface depth, transparency, and density, which also results in varying glare, view, and vista. Given its role as a shading, respectively glare reducing structure for office spaces, this section provides an overview of the shaders and their effect on view, vistas, and glare. Subsequent sections delve into the design concept and assembly process.
Shaders and glare
Sunlight can be differently transmitted to an interior space through a facade depending on the material and texture. Opaque materials, such as concrete, block light transmission; translucent materials, including frosted glass, result in diffused transmission; and transparent materials, including glass, allow for clear and non-diffused transmission [210]. Shade is defined as a cover or slight darkness resulting from an obstruction preventing direct sunlight [211, 212], and the shader is the object providing this cover or darkness [213]. A light shade is defined as a “decorative covering” placed near a light source to diffuse illuminance [214]. Sunshade devices are employed to shield building windows from direct sunlight, thereby enhancing the indoor environment of structures by mitigating the impact of solar radiation [215]. Historically, shading devices mitigated the adverse impacts of direct sunlight and solar radiation within buildings during warmer periods, while allowing for heat retention during colder periods [216]. However, all shaders have their impact on the glare in interior spaces. Shading systems can be divided into three categories: (1) fixed exterior sun blockers, (2) systems that eliminate glare by diffusing light, and (3) adjustable shaders. We can also consider shaders as fixed or movable. Movable shaders can be controlled manually, such as traditional fabric shades or blinds, or mechanically by using electrical power to control the direction and height of the shaders. While in movable shaders, the level of the shading system is adjustable, the operation and maintenance are usually expensive in energy and cost. Through a comprehensive assessment of light and view, architects can design permanent structures that not only regulate light intensity and glare effects, but also play a key role in space generation and associated spatial user experience. As such it represents sustainable design feature that not only addresses practical and functional considerations, but also requires minimal maintenance, aligning with principles of efficiency and long-term profitability.