Article Content
1 Introduction
Unmanned air vehicles (UAVs) have been applied in many tasks in recent years. There is fast development and improvement stage for them, and they have too much superiority with regard to the traditional manned aeronautical vehicles. Therefore, they have served for both military and commercial operations. Minimum operation costs, minimum manufacturing costs, and simple varying formation with regard to the client demands are some of the previously mentioned superiorities of the UAVs. These UAVs especially mini unmanned aerial vehicles (MUAVs) which are also applied in this research paper have been also applied during tasks of aerial photography, agri-drone services, and security for civilian aims. Additionally, MUAVs have been used for naval forces, land forces, and air forces for different aims [1]. It is also required to note that for the classification of the MUAVs the criteria of maximum 2 h endurance, maximum 10 km data link, and maximum 300 m flight altitude are used [2].
Through traditional aircraft design methodology, autonomous system engineers does not contribute impact on design of this air structure, whereas there is clear truth about this situation that the aircraft design and autonomous system design responsibilities are toughly relevant [3,4,5]. Insignificant modifications relevant with the aircraft design parameters may improve autonomous performance and also flight performance dramatically. On the other hand, the conventional methodology does not give the best global solution. In superior approach, the air vehicle system that will be autonomously controlled and the autonomous system is critical to be simultaneously designed meanwhile minimizing an objective. Here this truth is considered. After that, a MUAV constructed in Ankara Yıldırım Bayezit University Drone Laboratory (AYBUDL) and its autonomous flight control system (FCS) are stochastically and simultaneously redesigned by applying definite autonomous system parameters (i.e., PID controller gains for longitudinal and lateral flights) and battery powered powerplant system (i.e., propeller pitch and battery mass) meanwhile minimizing an objective capturing terms relevant with not only autonomous flight trajectory trackings but also flight endurance.
Several investigations in the aircraft/UAV literature have been done in order to revise powerplant/FCS for optimizing various aerial vehicle performance criteria. For instance, in [6] the finest situations for driving fixed-wing UAVs using PEMFCs (i.e., proton-exchange membrane fuel cells), considering different masses up to 25 kg was researched. Via optimizing the UAVs’ principal design and performance variables, not only efficiency but also endurance was proposed to be recovered. Increasing the fuel cells current from 5 to 10 A caused in efficiency drops by %7, and a power increase of 86.93%. It was also reached that the optimization application of different UAV sizes demonstrated that the high aspect ratio and low cruise speed reasons achievement of better performance. Additionally, in [7] a multi-objective and multi-point optimization methodology for serving the preliminary design of a turbofan fixed UAV was applied. An evolutionary multi-objective procedure was used in this research. Application of this approach caused that not only the fuel saves was found but also flight endurance was maximized. In [8] achievability of joining the two power sources, an internal combustion engine and electric engine to find a hybrid-electric UAV delivering both high flight endurance and low visual/heat/acoustic signatures were researched. From this study, it was reached that the conceptual design of the hybrid-electric UAV delivers an extended cruise endurance hybrid-electric UAV. This outcome however caused that expense of reducing the electric energy onboard: For every 1 Wh loss of electric energy for loiter, 13 Wh of cruise energy is gained. Both visual and acoustical signatures were also reduced in this study. In addition, in [9] powerplant revision on a small turbojet engine in order to decrease thrust specific fuel consumption (TSFC) meanwhile time keeping the engine’s thrust fixed was investigated. Substantial reduction in TSFC was found during keeping engine thrust fixed in this research. In [10] a design approach depending on hybrid blade element momentum theory (BEMT) coupled with propeller and airfoil optimizers were mentioned and it was found substantial rise in efficiency on optimized propellers. Moreover, in [11] a code for multi-objective optimization of selected variables of a turboprop mounted UAV in order to obtain both minimum landing-takeoff nitrogen oxide (NOx) emissions and minimum equivalent power-specific fuel consumption (ESFC) at loiter flight was investigated. For this intention, a genetic algorithm was applied. NOx emissions and ESFC were decreased by 26.6% and 9.5% from initial circumstance, respectively. In another research [12], a methodology for the aerodynamic redesign of engine propellers by using parametric and high-fidelity tools coupled with a structural evaluation scheme using finite element method was created. For this intention, several propeller formations were selected using BEMT and MIL (multiple-instance learning) methods. Firstly, an improvement of almost 80% in thrust generation competencies for a 1.48 m diameter 3 bladed propeller was found. Secondly, structural assessment was also demonstrated that reasonable stress concentrations for whole formations at the design point and a global recovered structural performance for a 0.99 m diameter 3 bladed propeller. In [13] UAVs powered by Li-ion batteries were selected. They were simulated in MATLAB/Simulink software by benefitting the electrical equivalent circuit. A detailed model was created via considering temperature, state of charge (SoC), cell dynamics, and operating functions. The consequences of this study were those increasing temperature prevents battery reactions from occurring sequentially and completely and also increasing internal resistance satisfies that the battery consumes its energy on its own internal resistance rather than on the system implemented (visit also References [14,15,16,17,18,19,20] for various different autonomous system revision studies with different aims and visit also References [21,22,23,24,25] for numerous different powerplant system revision studies with different purposes).
In this research article, first of all effect of battery mass and propeller pitch on MUAV’s flight dynamics and performance is expressed. Then, applied FCS structure is shortly shared. After following these, applied stochastical revision procedure for simultaneous and stochastical design is also given. Finally, results of simultaneous and stochastical revision procedure are shared in detail. It is important to note that this research article is the first article simultaneously and stochastically revising MUAV’s battery mass, propeller pitch, and also its FCS in order to improve both autonomous flight performance and endurance. This is the main contribution and novelty of this article. For this aim, implementation of a stochastical optimization approach (i.e., SPSA) is another significant contribution of this research article. By that way, the optimal solutions are obtained safe and fast.
2 Effect of battery mass and propeller pitch on flight dynamics and performance
In this section, effect of battery mass and propeller pitch on dynamics and performance of our MUAV is tried to be defined briefly. Figure 1 shows autonomous flight photo of our manufactured MUAV (for details of applied MUAV structure please visit Appendix section) (Fig. 2).

Autonomous flight photo of applied MUAV
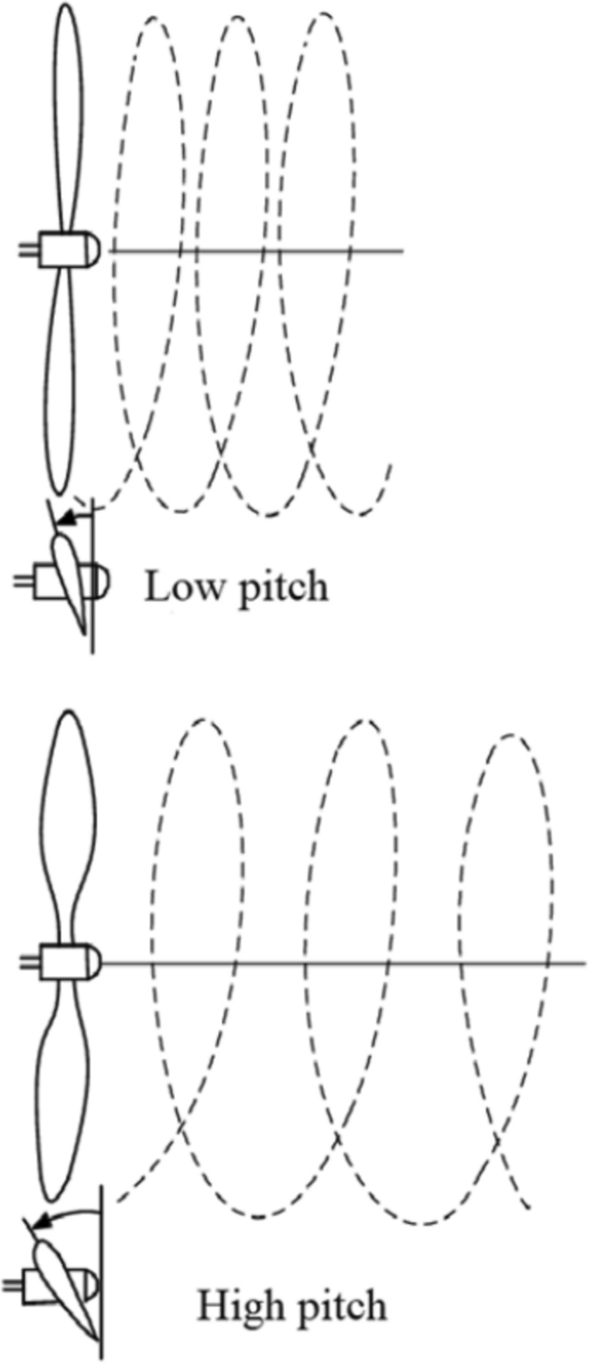
Demonstration of propeller pitch
Longitudinal and lateral state-space models for any generic fixed-wing aircraft are given in Eqs. 1a and 1b, respectively (visit References [26] and [27] for details and all of the equation derivations) below:
For instance, in Eqs. (1a) and (1b) one of the control stability derivatives varying with powerplant propeller pitch is after stochastical revision. In Fig. 3, propeller pitch is demonstrated. The relevant control stability term varies as below (see also Table 1 for nomenclature in order to better understand Eqs. 1–3):
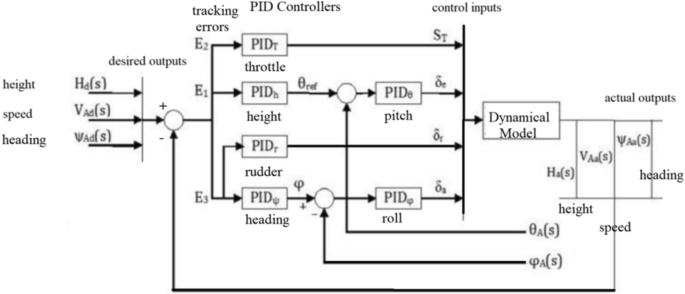
Hierarchical autopilot system structure
In addition, in Eq. 3 flight performance specifically endurance is examined. In Eq. 3a, relation between battery energy density and mass of the battery is shared. In Eq. (3b), relation in order to get endurance is shared (please visit References [28,29,30] for details). These equations are used during stochastical revision of the whole system.
3 Applied flight control system structure
In this section, a hierarchical autonomous system is selected for our flight control system structure and it captures 6 PID controller blocks inside and is used for autonomous control our MUAV. In Fig. 3, any hierarchical autopilot system structure is shared. It can be described briefly as following: Any hierarchical autopilot system has three layers (i.e., outer, middle, and inner loops) inside. Attitudes of MUAV (i.e., pitch and roll angles) are stabilized inside of the inner loop by applying control signals (i.e., elevator deflection control input for MUAV pitch and aileron deflection control input for MUAV yaw). Furthermore, heading and height/altitude are stabilized in the middle loop. Eventually, tracking of the x- and y-positions of the MUAV is accomplished in the outer loop. There are some useful references in order to better understand the details of relevant structure such as References [31] and [32].
4 Applied stochastical revision procedure
For stochastical revision of applied MAUV system and its FCS mentioned in this section, minimization of total cost index satisfying maximization of both autonomous flight performance and endurance is purposed and it can be formulated as following: and it consists of inverse endurance (i.e., ) and weighted autonomous cost index (i.e., ). The autonomous cost index can be formulated as following: where is the longitudinal cost index and is the weighted lateral cost index. These longitudinal and lateral cost indexes include terms (i.e., rise time, settling time, and overshoot) relevant with longitudinal and lateral trajectories, respectively, and exposes lower and upper barriers on revision variables (i.e., ) those are longitudinal PID controller gains, lateral PID controller gains, propeller pitch, and battery mass, respectively. For details of these defined functions and also weighting coefficients “a” and “b,” Appendix Table 4 is required to be visited. The initial conventional values for the optimization variables are (ie., kp = 50, kI = 5, kD = 50 for both longitudinal and lateral PID controllers, of engine propeller pitch, and in this article. The PID controller gains may change , propeller pitch may change , and battery mass may change meanwhile application of stochastical optimization. There is a strict reality for our situation that obtaining cost index derivatives with regard to the revision parameters is not analytically potential. This reality causes applications of definite stochastical optimization approaches. For the solution of previously mentioned problem, SPSA is selected in this research article. It has numerous superiorities with regard to the current methodologies. At first, it is considerably more economical by seeing the fact that it just applies two evaluations of the cost index meanwhile estimation of the gradient. Additionally, it is suitable for the solution of constrained optimization problems similar as here. Numerical experiments showed that SPSA is more efficient in finding the global minimum with respect to the other computationally expensive algorithms like genetic algorithms and fast simulated annealing [33].
A brief description of SPSA is mentioned next: is the estimate of at k-th iteration and . In this methodology, is the guess of the objective’s gradient at and it is evaluated as following:
where is a vector of p mutually independent mean-zero random variables satisfying definite circumstances [34,35,36], and are estimates of the objective found at and , respectively, is gain sequence and T is the matrix transpose symbol. In Fig. 4, application of stochastical revision idea on our system is demonstrated in a sketch. One can see from this figure that for the simultaneous and stochastical design the input is initial values of longitudinal and lateral PID controllers’ gains, there is cost function minimization procedure in this mentioned design phase, the resultant values of the optimization variables are used inside of the simulation model for making simulations; at the end, figures of longitudinal and lateral trajectory tracking are obtained.
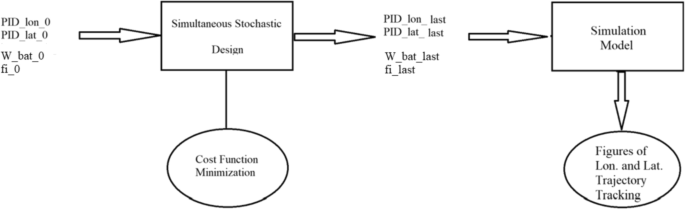
Demonstration of application of stochastical revision idea
5 Results of applied stochastical revision idea
In this section, stochastical revision of a manufactured MUAV by its engine propeller pitch, battery mass, and its flight control system issue is investigated in order to maximize both autonomous performance (i.e., meaning that minimization of a cost index capturing rise time, settling time, and overshoot during relevant trajectory trackings) and flight performance (i.e., specifically endurance here). For the longitudinal trajectory, our MUAV is required to track 5 degrees of aircraft pitch angle, and for the lateral trajectory similarly, our MUAV is required to track 5 degrees of aircraft roll angle. The cost index here captures parameters relevant with not only longitudinal flight but also lateral flight. Eventually application of stochastical revision notion rather than applying classical sequential methodology, remarkably greater cost index save is reached. In Fig. 5, total cost index save (5a), relative cost index save (5b), total-weighted autonomous-general flight cost indexes (5c), autonomous-longitudinal-weighted lateral cost indexes (5d), longitudinal PID controller parameters (5e), lateral PID controller parameters (5f), endurance (5g), change of engine propeller pitch (5h), and change of battery mass (5i) are given, respectively.
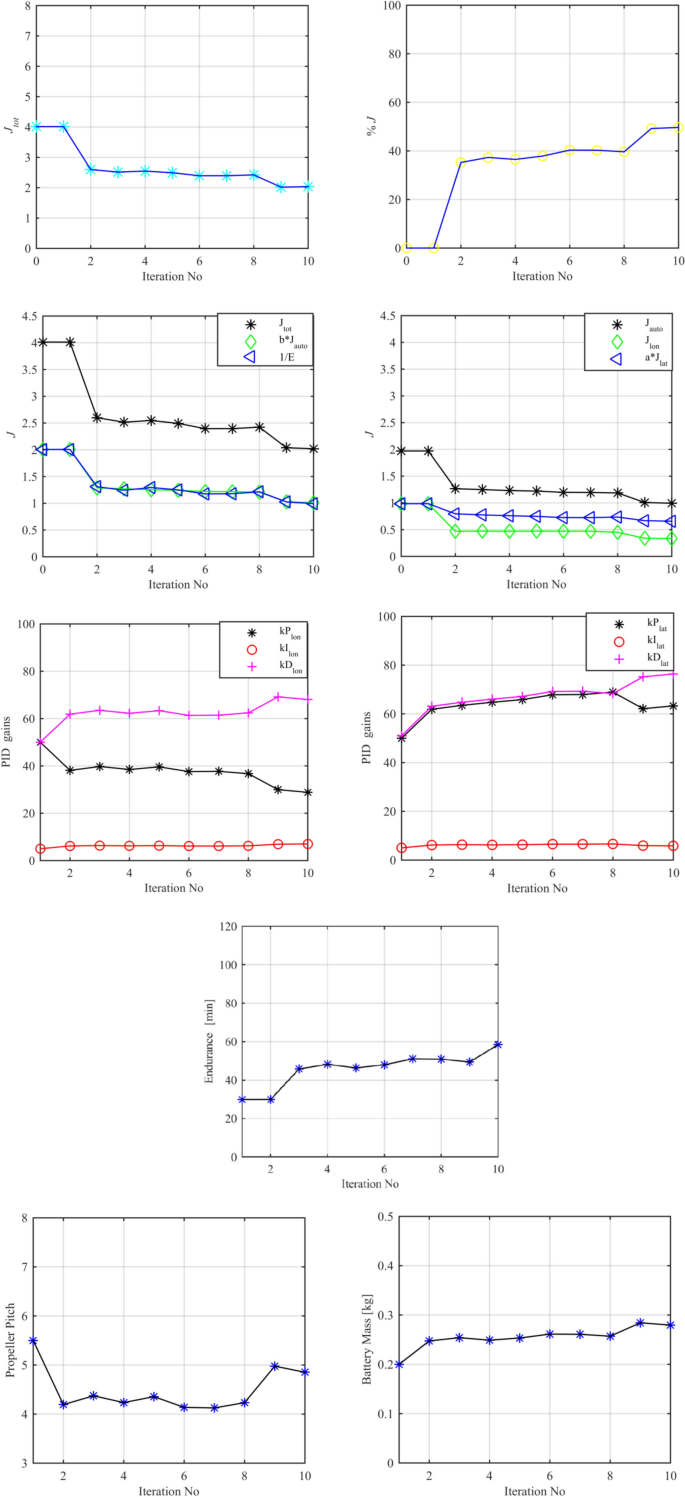
Stochastical revision results after applying simultaneous design notion
The relative cost index save with regard to the initial traditional circumstance (i.e., kp = 50, kI = 5, kD = 50 for both longitudinal and lateral PID controllers, of engine propeller pitch, and ) is almost 49% after promoting stochastical revision notion. In Fig. 5 for the starting iteration where revision parameters have the initial traditional values, the number “0” is selected. Besides, the resultant values of revision variables are kp = 30.3520, kI = 7.1828, kD = 69.5763 for longitudinal PID controller and kp = 64.7748, kI = 5.9816, kD = 73.3493 for lateral PID controller, 4.8519 for engine propeller pitch, and . Furthermore, approximately 49% improvement in total cost index, 50% improvement in autonomous cost index, and 100% improvement in endurance are obtained for this relevant battery powered electrical MUAV with respect to the situation where stochastical revision idea is not applied. For derivations of these consequences and also other optimum results, the Appendix section is required to be visited. It is also important to note that these consequences are also found in ideal weather conditions where the temperature is 20 and there is no important turbulence. These conditions are also crucial for that application of state-space models during obtaining closed-loop responses are valid. Figure 5c also shows that the behaviors of autonomous flight performance and also general flight performance are parallel.
For evaluation of the achievement of our stochastical revision notion, meanwhile the occurrence of minor turbulence on our dynamical system flight simulations is carried out by applying MATLAB/Simulink software. For relevant intention, firstly longitudinal closed-loop responses are given in Fig. 6. After that, in Fig. 7 lateral closed-loop responses are shared. In both of these figures, the x-axis and y-axis demonstrate time in seconds and related outputs, respectively. Definitions of the applied symbols are given in the Appendix section.
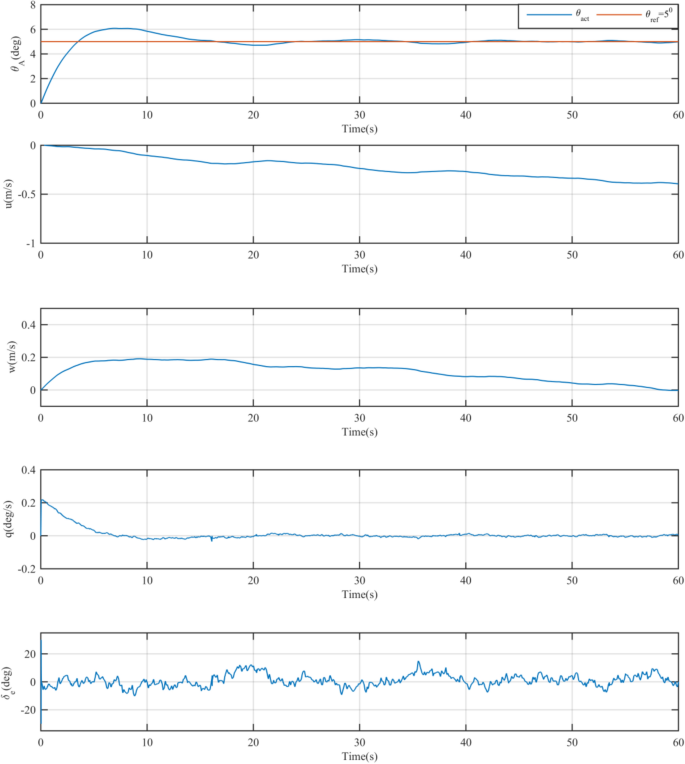
Longitudinal closed-loop responses of our MUAV
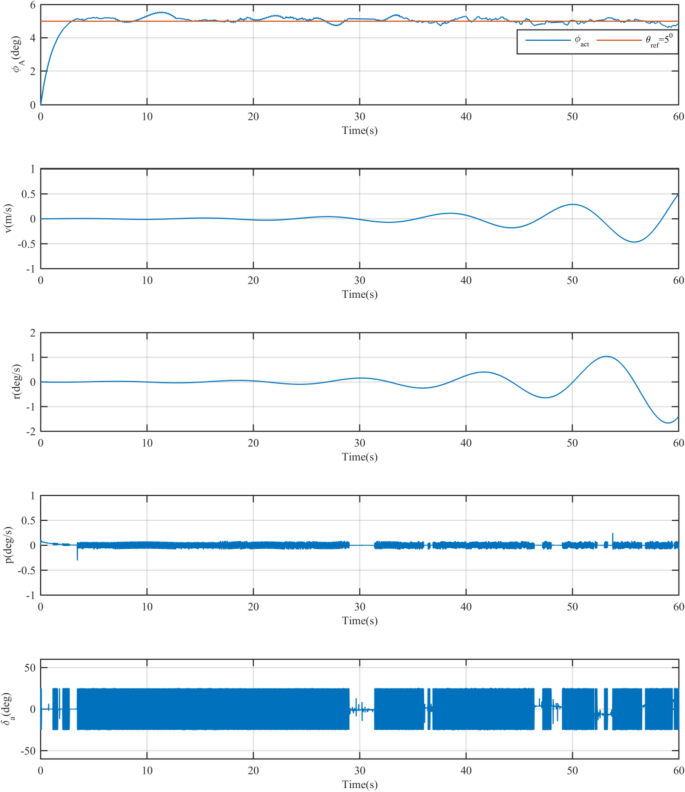
Lateral closed-loop responses of our MUAV
From Fig. 6 it can be evidently agreed that our FCS after use of stochastical revision notion permits tracking of the reference longitudinal trajectory successfully. The terms of the longitudinal cost index those are settling time; rise time and overshoot during longitudinal trajectory tracking are remarkably small because of the achievement of our stochastical revision notion. In addition, other outputs, for instance, u, v, and w, do not face to face fast and large oscillations meanwhile tracking longitudinal reference trajectory. Lastly, while presence of constraints on control inputs where ± 30 degrees for elevator exists here, the desired reference trajectory is also followed accomplishedly.
In Fig. 7 lateral closed-loop responses are given. It is obviously seen from this figure that after using our stochastical revision notion the lateral reference trajectory is tracked also accomplishedly. The parts of the quality criteria those are settling time, rise time, and overshoot are also considerably small after use of stochastical revision approach here. Additionally, other states, for example, v and q, do not experience fast and large oscillations during trajectory tracking. Lastly, when constraint exists on control inputs where it is equal to ± 30 degrees for aileron, desired lateral trajectory is also followed in accomplishedly.
6 Conclusions
Stochastical redesign of a manufactured MUAV (mini unmanned aerial vehicle) by its engine propeller pitch, battery mass, and flight control system (FCS) is pursued for recovering both autonomous performance and general flight performance in this article. Geometrical properties of the MUAV that is manufactured in our Ankara Yıldırım Bayezit University Drone Laboratory are benefited in this article. Its engine propeller pitch and battery mass can be varied before starting autonomous flight with regard to results of the stochastical revision idea. Gains of the longitudinal and lateral PID controllers, engine propeller pitch, and battery mass are the parameters those are simultaneously and stochastically revised in order to reach the best total cost index (i.e., meaning best performing autonomous flight and best endurance). Obtained optimized results are applied meanwhile simulations of longitudinal and lateral flights. Substantial improvement on total cost index which is almost 49% is found with regard to the traditional unrevised MUAV. This consequence is originated from finding minor overshoot, settling time, and rise time and also major endurance meanwhile longitudinal and lateral flights. Furthermore, besides approximately 49% improvement in total cost index, 50% improvement in autonomous cost index, and 100% improvement in endurance are found for this relevant battery powered electrical MUAV with respect to the situation where stochastical revision idea is not implemented.
Additionally, longitudinal and lateral closed-loop responses during existence of pure turbulence are also investigated and satisfactory results (i.e., meaning insignificant rise time, settling time and overshoot, and considerable endurance) are found. This research also contributes MUAV operators opportunity of better performing autonomous flight, better endurance, and also safer flight. It also important to note that our approach is valid for all types of the fixed-wing UAVs.