Article Content
Introduction
Recent advancements in earth moving robotics and additive manufacturing are changing the way landscapes can be designed, formed and maintained [1]. Impact printing is a robotic manufacturing methodology that enables the rapid aggregation of discrete units composed of heterogeneous malleable earth-based material into complex geometries [2]. Rooted in traditional earth construction methods, layers of material are added and then compressed, creating a strong bond between each layer without the necessity of mortar. Impact printing is a potential way for robotic manufacturing to use local materials found on-site with minimal processing to create temporary, biodegradable structures. Previous research has successfully established material requirements, tooling, optimized range of process parameters, toolpath strategies, and an adaptive framework based on real-time scanning feedback [3, 4].
The combination of autonomous systems, locally sourced natural materials and carefully designed microbial ecologies for microbiome engineering [5, 6] opens the possibility of adaptive and dynamic transformations of terrain to target site-specific issues such as soil health, pollution or adaptation to climate change [7]. Conventional bioremediation often requires soil excavation, transport, and off-site treatment, all of which can be expensive, and generate hazardous waste. In contrast, bioremediation through an architectural intervention works passively, acts in-situ, and is sustainable and cost-effective [8]. The convergence of additive manufacturing and bioremediation holds great potential as it allows for the design and fabrication of intricate geometries customized to support specific microorganisms. Through the optimisation of material choice, geometry and other physical factors additive manufacturing can be used as a tool for habitat creation for diverse microorganisms attuned to the desired biochemical functions. Specifically, additive manufacturing methodologies applied to robotic landscape fabrication have the potential to augment microbial activity through geometric and material optimization to strategically influence soil aeration and distribute nutrients more precisely [9]. Computational design and fabrication workflows allow for the rapid and flexible production of intricate designs tailored to the specific environmental and terrain requirements of a contaminated site informed by computational analysis tools and simulations [10].
Here we present an integrated approach which considers the entire process of robotic impact printing strategies and material-driven computational design for bioremediation. The potential of impact-printed architecture to create temporary interventions we installed a scaled-up version of an impact printed structure on a meanwhile site earmarked for future construction within the Barking Riverside development on the outskirts of London (Fig. 1). The specific brownfield site has a long anthropogenic legacy, having formerly housed a gasworks, and the soil possesses heavy metals such as lead and polycyclic aromatic hydrocarbons from a history of combustion. Reduction of contamination is a necessary, yet expensive, aspect of brownfield development. While bioremediation is one possibility, challenges remain regarding the delivery of beneficial microbes to degrade or sequester pollutants in-situ.
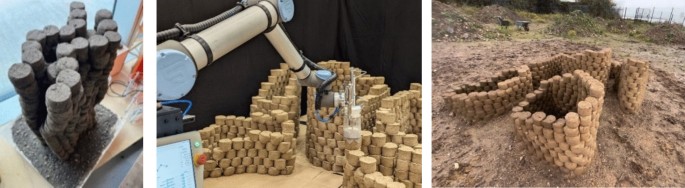
(Left) Phase 1: Robotic prototype with small bullets; (Middle) Phase 2: Robotic impact printing with large bullets; (Right) Deployment of the “Garden Anthromes”, an outdoor demonstrator installed at Barking Riverside, London installed at Barking Riverside, London
The project proposes a concept for a structure with a locally differentiated microbiome that reflects curated, meso and microscale site-specific interactions at the interface between structure and soil. Through laboratory-based explorations, we investigate how this may be applied to the augmentation of temporary structures for the delivery of functional microbial ecologies. Using a model system of a fluorescent plant growth promoting bacterium, Pseudomonas fluorescens [11], we examine the feasibility of alginate-based immobilisation as a delivery mechanism for beneficial microbes within impact-printed soil.
Materials and methods
Platform overview
The platform consists of an integrative framework for robotic landscape fabrication using impact printing, consisting of environmentally driven computational design, material processing and characterization, and robotic fabrication. The demonstrator presented in this paper was designed for a site-specific installation at Barking Riverside, UK.
The methodology was developed in a two-stage process. Phase 1 focused on bioremediation, involving prototypes with smaller bullets. Phase 2 centred on the construction of a larger installation of “Garden Anthromes” for Barking Riverside, utilizing larger bullets. Environmental analysis was conducted in the later stages, primarily to monitor the weathering of the Barking construction.
Materials
Initial material development started with preliminary experiments on controlled material formulation using sieved soil (Huws Gray Bow) to evaluate its suitability for impact printing mixed with various additives such as aggregates, fibers, and biopolymers. Pre-graded soil (Bourne Amenity TS3 Clay Loam mix) without additives was utilized during the scale-up in the demonstrator production phase to ensure consistency and reliable performance in the manufacturing process. Soil mixes were homogenized using a Soroto forced action mixer. Bullets were formed using a custom-built jig during initial small-scale testing. For the large-scale prototyping bullets were formed using a Peter Pugger VPM-100 Power Wedger. Bullet diameter was determined at 77 mm and a height of 100–120 mm.
Robotic manufacturing set-up
The fabrication setup uses a UR10 six-axis robotic arm with a custom-designed impact printing end effector to sequentially pick, orient, place, and compact blocks of material. The end effector was developed in two iterations. The first, smaller model facilitated testing of material workflow and layer consistency, using a single pneumatic actuator to control material deposition. The second, larger iteration incorporates three independently controlled pneumatic actuators to handle greater material volumes for full-scale construction. This design includes a 100 mm acrylic tube for precise positioning, two pneumatic actuators for picking and a pneumatic actuator for compression (Fig. 2).
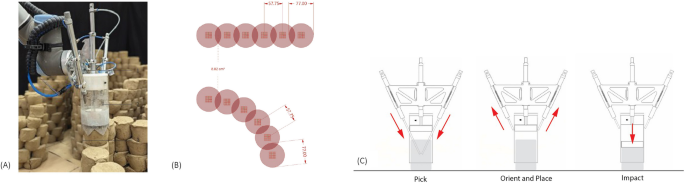
Impact printing end effector and deposition logic. (A) Large scale end effector (B) Spacing between adjacent bullets and overlapping volume in linear and curved sections. (C) Pick, orient, place and impact logic of adjacent bullets
Preliminary geometries for the larger scale prototype at Barking Riverside were developed using a generative algorithm in Houdini FX. These were later rebuilt in Rhinoceros 7.0 for easier constructability. The robot motion and tool commands were developed using the ‘Robots’ plugin in Grasshopper3D within the Rhinoceros 7.0 environment. Environmental simulations including solar radiation analysis were performed in the ‘Ladybug’ plug-in in Grasshopper3D within the Rhinoceros 7.0 environment, and wind simulation in Autodesk CFD to understand and rationalize the weathering process.
Formulation and evaluation of impact prints
Preliminary material development focused on optimizing soil parameters for both small-scale prototyping and eventual large-scale fabrication. Candidate soils were selected based on aggregate size and clay content, with experiments testing various soil compositions, binder i.e. xanthan gum, and bullet sizes. Samples, dried under controlled conditions, validated initial formulations. Small-scale aggregation tests were conducted to assess the material’s performance under sequential compression. Mechanical testing using a Zwick Roell AllroundLine Universal Testing Machine (UTM) measured material properties.
Microbiological testing of bioaugmentation
To evaluate the viability of Pseudomonas fluorescens immobilised in sodium alginate beads, three environmental scenarios were tested: 4 °C (wet), 23 °C (dry), and 23 °C (wet). The dry condition was achieved by fully desiccating the beads to mimic limited water availability. After a 5-day incubation, cell viability was assessed by serial dilution in phosphate-buffered saline (PBS) and performing a colony-forming unit (CFU) count using ImageJ software. The results were statistically analyzed using Student’s t-test in Microsoft Excel. The long-term survival of P. fluorescens was also assessed in two soil substrates one clay-based and one sodium alginate-based incubated for 16 weeks at 23 °C, with release quantified through plate counts after simulated impact-printing of a small, pyramid-shaped structure.
Results
Material development
The results show that aggregate size, clay content and water content significantly affect the performance of the impact printing process (Fig. 3). Larger aggregate sizes in unsieved soil over 6mm tended to reduce material cohesion and increase the likelihood of clogging and manipulator emergency stop due to aggregate entrapment. Higher clay content in topsoil mixes (> 75%(w/w)) was critical in improving cohesion and layer bonding. Topsoil mixes with low water ratio (< 15%(w/w)) exhibited poor workability. The material was too dry and stiff, resulting in significant friction in the barrel during deposition and mechanical resistance upon compaction. An optimal water ratio (15–20%(w/w)) displayed a balanced consistency, facilitating smooth deposition without clogging and precise layer deposition. Samples containing xantham gum showed improved water retention, plastic deformation and stability and were selected for further testing along with samples containing topsoil only. Bullet size was determined by the maximum payload of the robot.
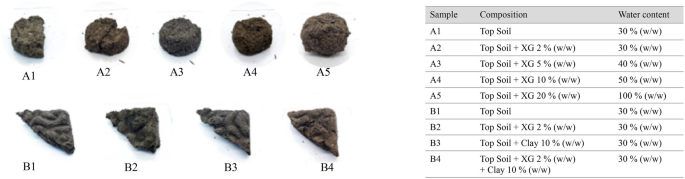
Samples (A) Material tests combining topsoil with xanthan gum (XG) and water in various ratios to optimize soil stability and moisture retention. Samples (B) Shape retention tests with topsoil containing xanthan gum and clay
Compression testing
The non-compressed soil samples exhibited an average failure stress of 13.3 kPa ± 4.1 kPa, while the compressed soil samples showed a significant increase, with a failure stress of 21.8 kPa ± 3.5 kPa. This corresponds to an increase of approximately 63.9% in the failure stress of the compressed samples relative to the non-compressed samples, indicating the substantial effect of compression on the strength of the soil. In terms of elastic modulus, which reflects the stiffness of the material, the non-compressed samples had an elastic modulus of 306 kPa ± 75 kPa, while the compressed samples demonstrated a much higher Young’s modulus of 708 kPa ± 82 kPa. This represents a dramatic increase of approximately 131% in stiffness after compression, further highlighting the influence of pre-compression on the material’s ability to resist deformation under stress (Fig. 4).
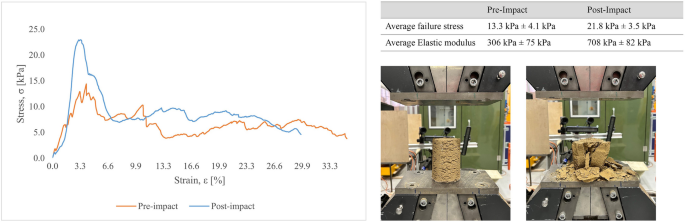
Stress–strain curve for samples pre- and post-compression Table 1. Average failure stress and average elastic modulus with standard deviation for pre-impact and post-impact bullets. (Right) Samples post- and pre-compression in the Zwick-Roell compression testing machine
Proof of concept prototypes
Bullet deformation is inextricably linked to the malleability of the material, the size of the units and the compression force applied by the robot manipulator (Fig. 4). Initially, in small-scale tests, the cylinder barrel and plunger system effectively handled and compressed the topsoil units, ensuring uniform shape and density. The viscous drag created by the cylinder of 50 mm diameter was sufficient to pick, orient and place the malleable topsoil bullets of the various mixes were tested through small scale prototypes of 750mm in height, 150mm depth and 450mm in width. Solar radiation and structural analysis were tested on various design iterations to understand design posibilities (Fig. 5).
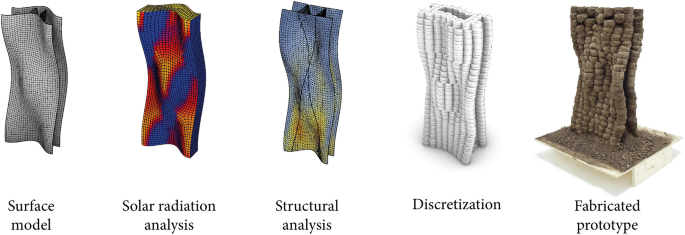
Small scale prototypes. (Left to right) Surface model, solar radiation analysis, stress analysis, digital discretization for manufacturing, fabricated prototype
Computational design
Unlike additive manufacturing methods that rely on continuous material deposition such as 3D printing, impact printing consists of a process of sequential deposition of units of material to construct volumetric structures. As such, the segmentation of an impact printed manufactured structure requires the contouring of a volume according to a specific layer height and a subsequent discretization of contours to create targets consisting in position and orientation data. The layer height is derived from material behavior data dependent on bullet height, volume, compressive force and material yield stress. Bullets are placed in a running bond pattern to enhance the overlapping area between alternating layers which ensures that vertical joints are staggered resulting in overall improved structural integrity. The robotic-fabricated bioremediation structure is designed as a series of components or ‘Anthromes’ overall forming a simplified reaction–diffusion pattern to optimize the surface-to-volume ratio, enhancing interaction with contaminants for improved remediation efficiency. This morphology increases diffusion and flow dynamics, facilitating microbial, plant, or material-based movement. The footprint of each Anthrome was carefully scaled to fit within the robot’s working envelope, ensuring precision in fabrication, while also being optimized for transport by conforming to the dimensions of a standard pallet. This modular approach allows for efficient on-site assembly (Fig. 6).
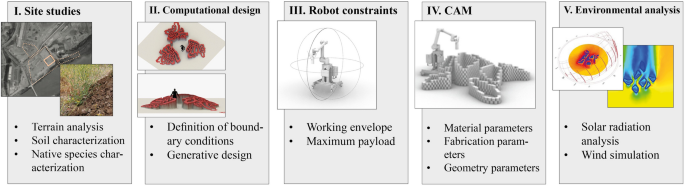
Design development to digital fabrication workflow encompassing site studies, material-driven computational design and post-construction environmental analysis
Full-scale demonstrator
Scaling up presented challenges due to the increased volume and mass of the bullets. Mixes with and without xanthan gum exhibited desirable rheological properties for impact printing with a compression of around 60%. Topsoil mixes containing xanthan gum showed poor layer adhesion. The optimized parameters at a prototype scale and large scale are shown in Table 1.
The larger volume bullets significantly increased the drying times therefore affording prolonged time frames for fabrication. This, however, led to a tendency for bullets to crack upon drying, whereas smaller bullets did not. In larger units, the exterior was observed to dry more rapidly than the interior, creating significant moisture gradients, resulting in cracking. To prevent cracking, prototypes were covered immediately after fabrication to ensure more even drying process.
The final prototypes measuring 5 m in length, 3.5 m in width, and 1.5 m in height (Fig. 7) were built using the TS3 clay loam mix without xanthan gum and were transported from UCL Here East and installed on site at a meanwhile site in Barking Riverside (Fig. 8). Over the last 12 months, the installed structure significantly evolved, with evidence of a cryptogamic surface cover (algae and moss) observed on bullets that had a northeast orientation. Protected from dominant southwest winds, these surfaces retained more moisture which enabled growth yet increased the erosion of soil bullets (Fig. 8).
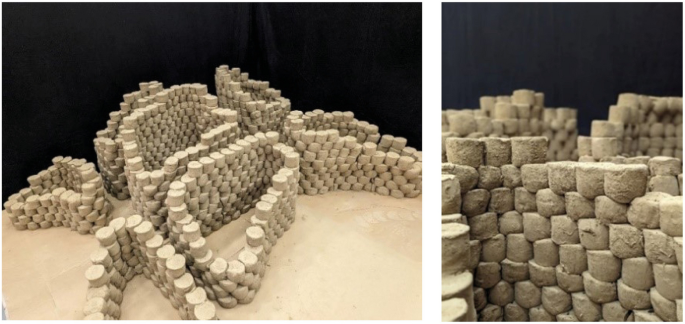
Large-scale demonstrator pre-installation at UCL at Here East, London
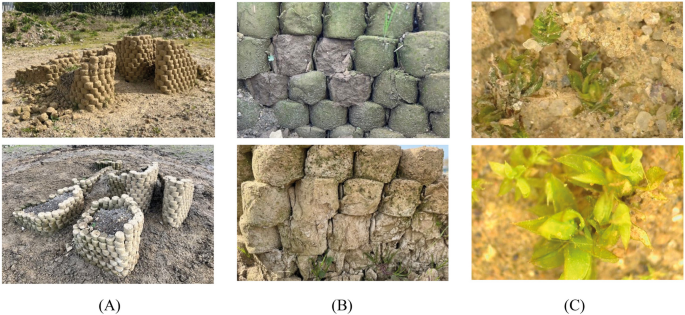
(A) Garden Anthromes with first evidence of algae growth – December 2023. (B, C) Garden Anthomes with evidence of cryptogamic growth and notable erosion due to weathering on northeast facing side – April 2024
Environmental interpretation of installed demonstrator
Post-installation, solar radiation analysis using ‘Ladybug’ in Grasshopper3D and wind simulations with Autodesk CFD were used to rationalize observational studies of impact printed soil structures in-situ and provide explanations for moisture retention (Fig. 9A). ‘Ladybug’ allows for detailed analysis of sunlight exposure, enabling the strategic placement of shaded areas within the structure to create pockets with humid microclimates. These shaded regions are crucial for reducing excessive solar radiation, thereby minimizing evaporation and helping the soil retain moisture, which is essential for supporting microbial activity and plant growth. Autodesk CFD complements this by simulating wind flow, providing insights into how air circulation affects moisture distribution and evaporation rates (Fig. 9B). Optimizing airflow could be influential for soil-based microbial activity, as air movement directly affects soil moisture and oxygenation in relation to bioremediation activity. Wind simulations help ensure proper ventilation around soil-based remediation structures, preventing excessive drying or stagnation that could reduce microbial efficiency. In bio-walls or green facades, modeling airflow allows for a balanced exposure, providing sufficient oxygen without causing desiccation. Additionally, soil-based bioremediation often works in tandem with plant systems, where evapotranspiration contributes to both cooling and contaminant breakdown. By strategically positioning plant-covered soil structures, wind simulations enhance these cooling effects, improving air quality and supporting urban microclimates.
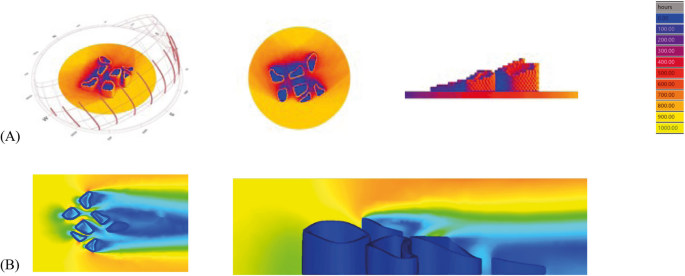
Environmental analysis post-installation. (A) Solar radiation analysis. (B) Wind speed simulation
Evaluating potential for delivery of microorganisms through impact-printed soil structures
Cell viability studies in immobilized beads showed growth across all treatments after a 24 h incubation period. Temperature differences had a more pronounced impact on cell viability (p = 0.00017, ***) compared to dry versus wet conditions (p = 0.001571, *). Overall, all treatments yielded significantly different results, highlighting the importance of environmental parameters in the viability of P. fluorescens (Fig. 10). This experiment also illustrates the release of viable cells from the beads without a full degradation of the hydrogel material, thus providing evidence that this technology could support slow release of microorganisms to the surrounding environment. In a qualitative test, P.fluorescens also survived in the soil substrates over the 16-week period and were detectable in both the clay/soil and clay/soil/alginate mix.

(A) Average CFU/ml under varying environmental conditions. (B) Cell viability assessment methodology showing colonies formed after soil simulation (C) Detection of P.fluorescens colonies after release experiment
To examine migration of bioremediating bacteria from an impact-printed structure, a simulation of microbial release was conducted with a running water test. After 24 h, fluorescing colonies were observed under ultraviolet light on the 1:10 dilution plate, and after 39 h a lawn of colonies was observed for all dilutions. The results suggest that the model organism P.fluorescens is capable of surviving and proliferating within automated earth constructions, and in principle can be detected when structures are eroded by water. Sensitivity to environmental conditions suggests that material formulation, and orientation of constructions are critical components to promote amenable conditions of temperature and humidity for cell survival and growth, which will ultimately determine the quantity of bacteria that can be released for bioaugmentation (Figs. 10 and 11). Furthermore, the niche environments created by the structure design not only has demonstrated a significant effect on the cell viability, but is also crucial for further considerations of bioremediation strategies. This applies especially if these approaches also include plant-microbe interactions or cascading phytoremediation strategies attuned to the needs of the local ecosystem (Fig. 11).
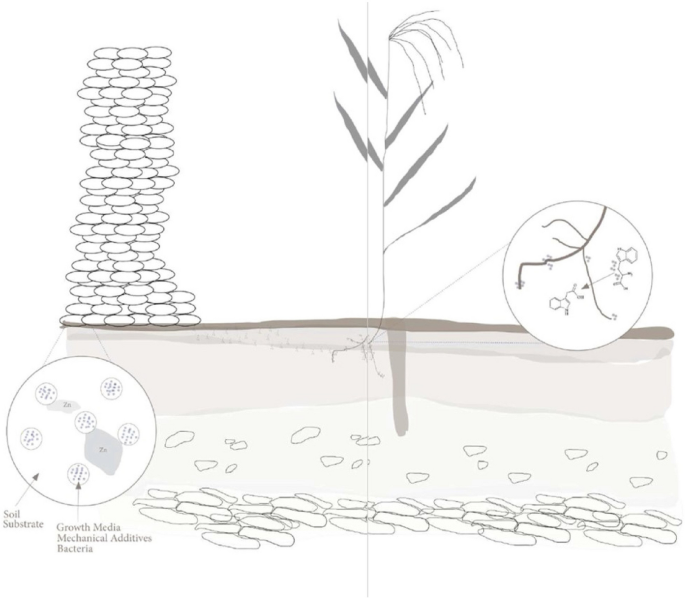
Proposed mechanisms for bioremediation within an impact-printed soil construction
Discussion
In this paper we demonstrate the successful manufacturing of a full-scale impact printed structure for installation at a meanwhile site. Multiple prototypes at various scales were produced using topsoil mixtures with enhanced organic content and moisture control. Rheological behavior including yield stress and plasticity, moisture regulation and bullet size were calibrated and optimized for structural integrity to accomplish repeatability in manufacturing and facilitate future bioaugmentation.
Scaling up from a validated small prototype ensured that the larger version inherited the calibrated operational parameters, thus minimizing risks and enhancing robustness in the robotic manufacturing of impact printed prototypes. Overall, this work demonstrates the potential of large-scale impact printing for the creation of temporary landscapes and could be applied in future for bioremediation and ecological restoration. While the ‘Garden Anthromes’ did not include any pre-inoculated biological material, lab scale studies indicate that biological material retains viability and can be delivered though soil-based impact printing. Subsequent iterations should address the challenges associated with scaling up, environmental variability, and microbiome integration. This study used purchased soil which was closely matched to the site soil composition to facilitate consistency during early stages of experimentation. Future research would look at fully working on-site, including the sourcing of materials, inoculation and fabrication. This offers several advantages, including the ability to use only materials found on-site, directly integrate with the landscape and minimize transportation logistics.
This paper marks the first step in a long-term research effort to test the feasibility of using automated impact printing for constructing large-scale bioremediation structures. We begin by conducting experiments in a prefabricated, controlled environment, allowing us to systematically study critical variables such as deposition rate, material curing times, and overall throughput. These findings will inform how our process can be adapted, scaled, and timed efficiently once we deploy mobile robots in real-world, dynamic environments. Moving forward, our approach will build by combining large-scale, customized systems for impact printing of clay as demonstrated by Gramazio Kohler Research at ETH, Zurich [12] with on-site earth-based printing techniques for Nubian vault construction demonstrated by the University of California Berkeley [13]. Taken together these can overcome scale limitations and enable real-time adaptation to site-specific conditions particularly important when working on contaminated land. The goal is to integrate mobile robots capable of autonomously navigating and constructing remediation structures with reliable time management ensuring each step, from material placement to curing, is optimized for on-site conditions. Beyond initial formation, automated systems could also be leveraged for ongoing maintenance, such as reapplication of soil amendments [14] or monitoring microbial activity.